バイオミメティック生体模倣人間型ロボットハンド

ロボットハンドは、2本指や3本指で構成し、「つかんで移動する」などの動作の目的に応じて設計するのが、いわゆる普通のロボットハンド。
義手のように人の手の形を維持しようとすると、人間の手の複雑さのため、つかむ、置く、ねじる、等の人間っぽいフォームファクタを維持しながら、それを適切に動作させるためには、多くの妥協を伴います。
エール大学の Zhe Xu博士研究員と、ワシントンの大学の Emanuel Todorovは、完全に人間の手と交換する究極の目標で、私 たちが今まで見た中で最も詳細かつ運動学的に正確な生体模倣人間型ロボットハンドを構築しています。
Zhe Xu氏による新しい種類のロボットハンドを設計することが重要である理由
「人間型ロボットハンドを設計する従来の手法は、多くの場合、複雑な人の動きを簡略化するために、ヒンジ、結合、およびジンバルとの生物学的な部品を機械化することが必要になる。このアプローチは、人間の手の運動を近似するのに便利ですが、必然的に人間の手の生体力学的機能のほとんどが機械化プロセスで廃棄されているので、人間とロボットの手の間の望ましくない矛盾が発生します。これらのロボットハンドの機構と人間の手の生体力学の間の不整合は、自然な人間の手の動きを使用することによって防ぐことができます。既存の人型ロボットハンドのどれもまだ人間レベルの器用さを達成することはできません。」
↓参考に、彼らが求めているであろうルークスカイウォーカーの義手

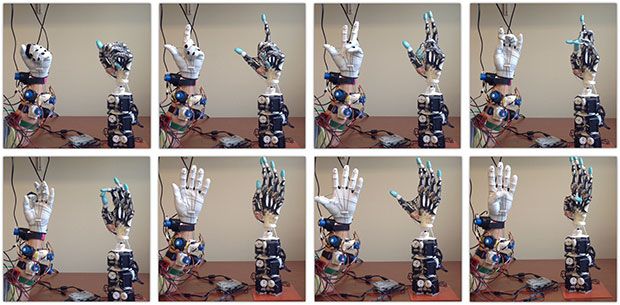
XuとTodorovは、可能な限り正確な方法で機械的に人間の手を複製、ゼロからスタートすることにした。人間の手のスキャンで3Dプリンターの人骨を作り、関節軸を複製した。

非常に興味深いのは、Xuさんが説明するように、四肢再生の研究には3Dプリントした骨格を使用することができることを示唆している。
「義手の制御は、基本的に人間の脳に依存しています。義手等の設計は、その生物学的対応物に類似することができれば、ニューロプロセティック技術がより効果的である可能性があります。生体適合性材料は、現在、骨の構造を形成するために3D印刷することができ、生分解性の人工靭帯が破れたとき、前部十字靭帯を置換するために使用されています。人間の筋肉が正常にペトリ皿に栽培されており、末梢神経も適切な条件を与えれば、再生することができます。これらの有望な技術のすべてが移植された細胞の増殖に適した足場を必要とします。私たちはさらに神経機能代替と四肢再生の新興分野におけるバイオ加工素子として機能する可能性を探求する生物学および組織工学の研究者と協力しようとしています。」
Xuとワシントン大学のEmanuel Todorovのによる「人工四肢再生に向けたバイオミメティック人間型ロボットハンドの設計は、「2016年5月に、スウェーデンのストックホルムICRAで発表される予定。
Via: